Comparative Study: Stepper Motors vs. Brushless DC Motors
Charan Bhamra
Introduction
For engineers and designers working on modern-day applications, it is vital to understand the advantages and disadvantages of stepper and brushless DC (BLDC) motors. This article will look at a widely used hybrid stepper motor and a 3-phase BLDC motor to compare both devices.
This study will consider the working principles of these motors (e.g. physical size and power density) and make observations about the acceleration and noise aspects of each motor. Experiments were performed under various load conditions to compare changes in power, efficiency, and temperature.
Working Principles
Stepper Motor
Most widely used stepper motors are hybrid stepper motors, which consist of permanent magnet rotors and electromagnet stators. Rotors have two cups with permanent magnets: one with north poles, and a second with south poles. Figure 1 shows the simplified working principles of hybrid bipolar stepper motors.
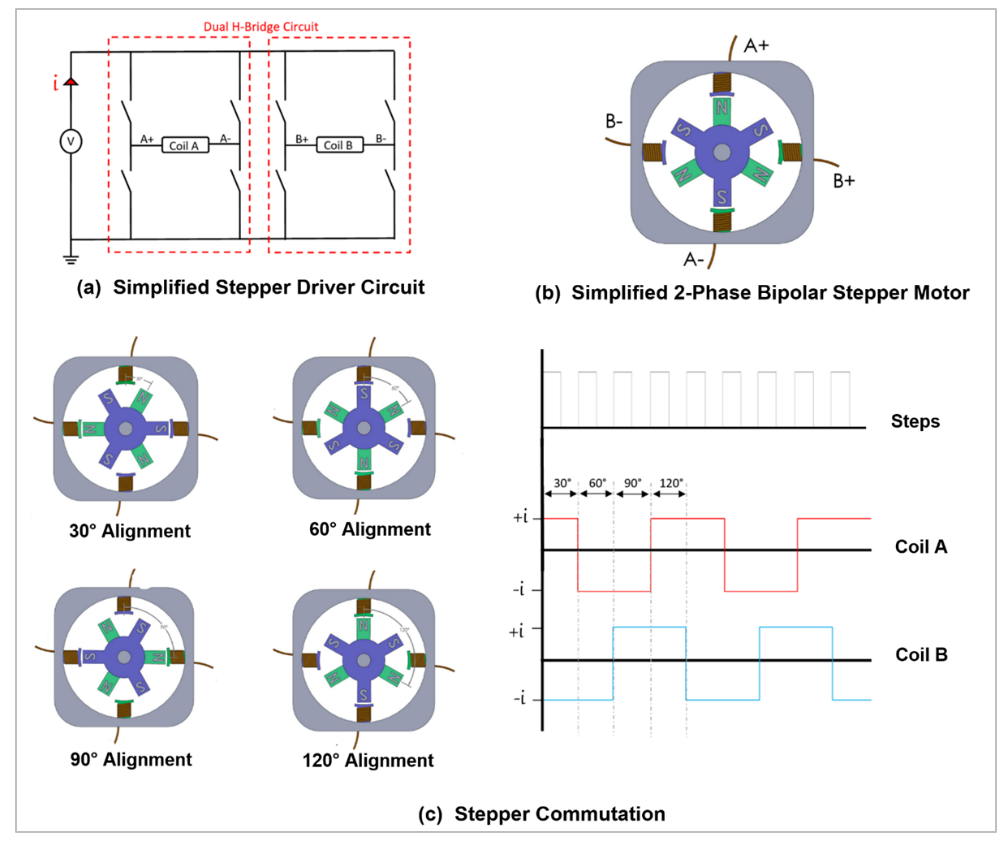
Figure 1: Simplified Hybrid 2-Phase Bipolar Stepper Motor
This simplified stepper motor has a rotor that is made of two cups of permanent magnets. Each cup has three teeth with a respective magnet pole. In this case, these cups are assembled such that they are out of phase by a half-pitch (60°). The stator consists of four poles with two phase windings.
Steppers are electronically commutated. According to step input pulses, the bipolar stepper driver uses a dual H-bridge circuit (denoted as (a) in Figure 1) to energize the stator poles in a sequence that allows the rotor to rotate by a step angle. The step angle can be calculated with Equation (1):
$$Step Angle (in°) = \frac {360}{2 \times (n_{ROTORTEETH})(n_{PHASE})}$$For each step pulse, the rotor rotates 30° — this stepper is known as a 12 full-step stepper motor. During full-step operation, the commutation sequence and rotor position follow a particular sequence (denoted as (c) in Figure 1). Most stepper motors in the market have 50 or 100 pole pairs, with 200 or 400 full steps for one full rotor revolution. This makes the step angle as small as 1.8° or 0.9°.
With an advanced stepper motor driver, this small step angle can be further divided into even smaller angles by implementing microstepping operation. The step angle can be reduced by a half-step, quarter-step, and up to a 1/256 step. Stepper motors offer superior positional accuracy since they can step by such small angles.
Brushless DC (BLDC) Motor
Brushless DC motors have a permanent magnet rotor and electromagnet stator and require electronic commutation. Figure 2 shows the working principles of a BLDC motor and a simplified single pole pair 3-phase BLDC (denoted as (a) and (b) in Figure 2, respectively).
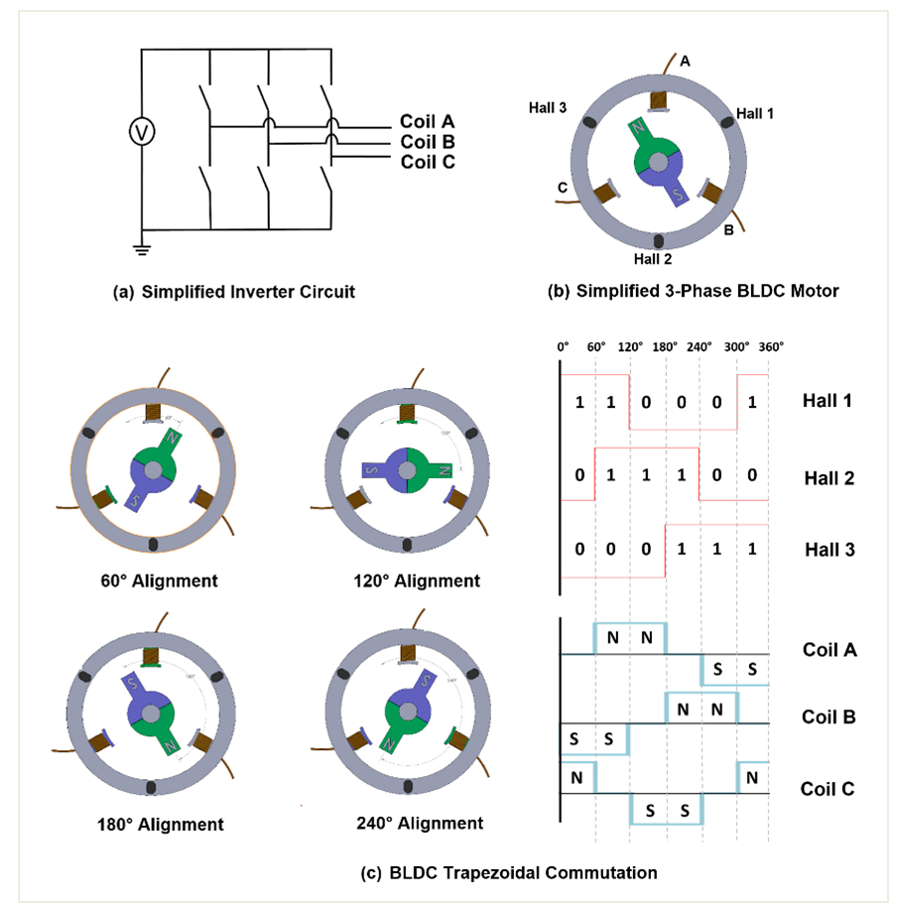
Figure 2: Simplified 3-Phase BLDC Motor
To commutate brushless DC motors, the instantaneous position of the rotor is required. To meet this requirement, Hall-effect sensors are utilized to realize the rotor’s angular position. This information in fed to a microcontroller (MCU) that switches the phase winding current using the 3-phase inverter circuit. Essentially, the DC input voltage is converted to 3-phase AC voltage to sequentially energize the stator poles using an inverter circuit (denoted as (a) in Figure 2).
The rotor magnetic field always chases the stator magnetic field, which results in BLDC motor spinning. Since the simplified motor is a single pole pair BLDC, each commutation step is 60 electrical and mechanical degrees. BLDC trapezoidal commutation and the rotor position can be obtained (denoted as (c) in Figure 2). However, typical trapezoidal commutation makes the motor susceptible to torque ripples. As a result, an advanced commutation called field-oriented control (FOC) is used on the BLDC for testing. FOC provides minimal torque ripples and smooth motor operation.
Experimental Set-Up
Stepper Motor Test
To set up the stepper motor test, a NEMA 23 bipolar stepper motor is used along with a magnetic particle brake for load simulation. The motor test requires five main components. These components and their functions are described in greater detail below:
• An encoder (mounted on the particle brake’s other end) monitors the shaft’s rotational speed.
• A bipolar stepper motor driver — featuring parallel inputs, internal current sensing, and regulation — controls the stepper motor.
• A 24V DC bench supply placed in series with a current meter measures the DC current draw of the stepper motor under different load conditions. In addition, the 24V DC bench supply powers the stepper motor driver.
• The motor driver’s MotionLAB, which is compatible with the serial peripheral interface (SPI), configures the stepper motor driver’s parameters, such as the step mode, rated current, and additional motor settings.
• A function generator sends square pulses to the driver, which drives the motor forward.
Figure 3 shows the block diagram of the stepper motor’s experimental set-up.

Figure 3: Experimental Set-Up for the Stepper Motor
Brushless DC Motor Test
Similar to the stepper motor test, the brushless DC motor test set-up includes a magnetic particle brake for load simulation, as well as a NEMA 17 BLDC with an integrated controller. EZmotion’s MMS742038-24-R1-1 is an all-in-one motor control solution that includes a built-in power stage driver and FOC controller with an embedded position sensor.
To power the controller, a 24V DC bench supply is used in series with a current meter to measure the DC current draw of the brushless DC motor under different load conditions. Then the MotionLAB GUI can drive the BLDC in speed control mode for this test.
Figure 4 shows the block diagram of the brushless DC motor experimental set-up.
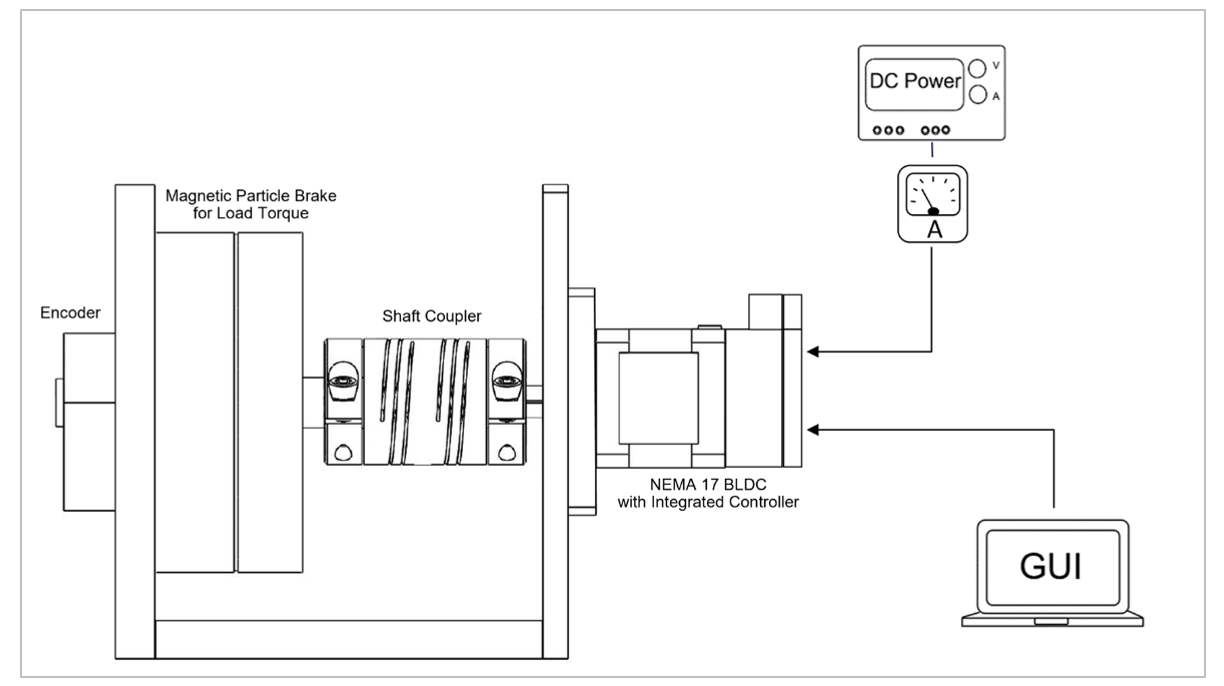
Figure 4: Experimental Set-Up for the BLDC Motor
DC Current Draw Comparison
Steppers typically operate under constant current, otherwise known as constant torque. This forces steppers to always draw the maximum current, regardless of the load on the motor shaft. As a result, steppers can provide maximum torque across the low speed range. However, this also leads to large amounts of wasted energy in the windings in the form of heat.
In this experiment, the stepper motor was tested in three microstepping resolutions: half-step, fourth-step, and eighth-step. Figure 5 shows the DC current draw at various motors speeds under three different load conditions (no load, 8.2N-cm, 11.5N-cm). The experimental results demonstrate the stepper motor’s less efficient measured DC current draw compared to a BLDC motor.
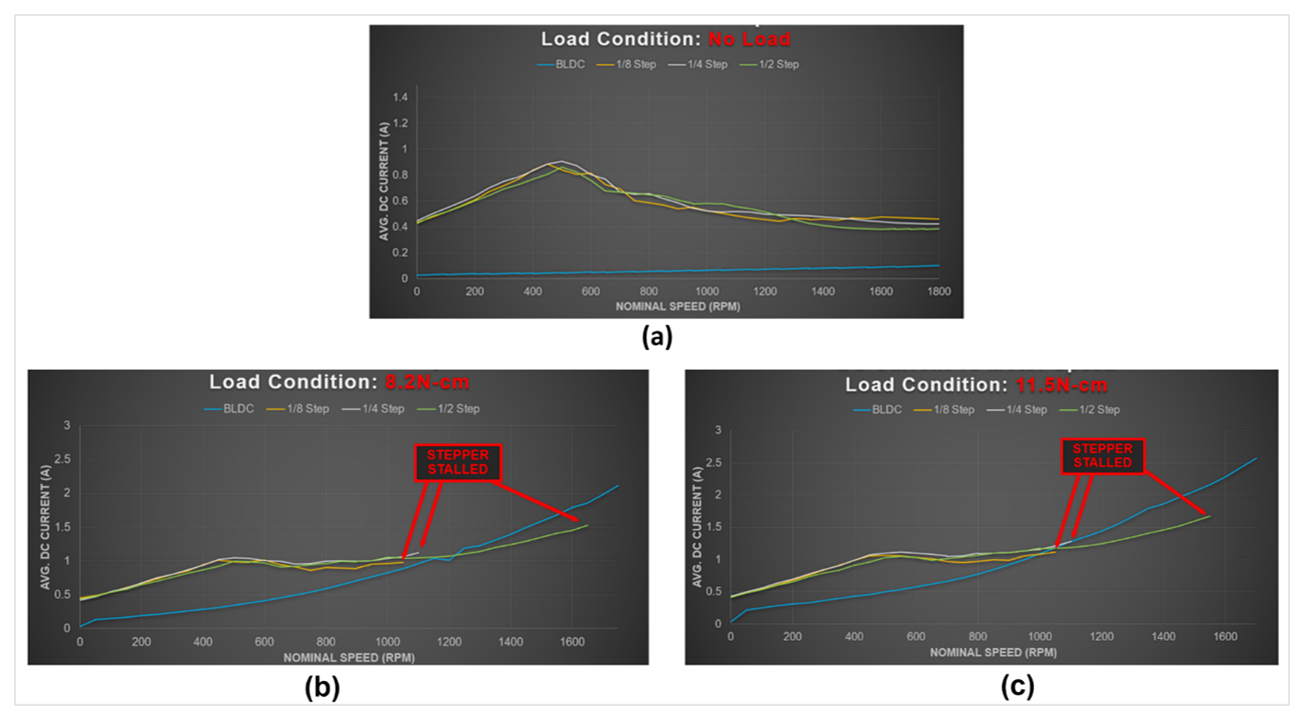
Figure 5: DC Current Draw at Various Motor Speeds under Different Load Conditions
Figure 5a shows the no-load current draw for the brushless DC motor, half-step stepper motor, fourth-step stepper motor, and eighth-step stepper motor. The stepper motor draws a significantly higher zero-speed current than the BLDC, even when there is no mechanical operation. Furthermore, the stepper motor current draw remains high across the low-speed range. As the motor speed increases to the high-speed range, the stepper motor’s current draw begins to decrease due to the inductance of the motor windings and back EMF.
Figure 5b and 5c show the current draw for the BLDC motor, half-step stepper motor, fourth-step stepper motor, and eighth-step stepper motor when there is some load added on the shaft. The stepper motors stall at high speeds because they have less current in the windings. Although microstepping increases the motor’s positional resolution, it also decreases the output torque. The eight-step and fourth-step stepper motors stalled at the mid-range speed as well. Meanwhile, the BLDC motor only draws what it needs depending on the shaft’s load.
Under no-load conditions, the BLDC draws a very small current to rotate the rotor. At the same time, the current draw increases if load is added to the shaft, allowing the BLDC motor to continue spinning at a higher speed than the stepper motor. Therefore, BLDC motors are highly power-efficient compared to stepper motors due to their ability to draw current based on the load.
Power Density Comparison
Power density is a measure of motor output power per unit volume. Brushless DC motors typically have higher power density compared to stepper motors. Figure 6 shows the key dimensions for BLDC and stepper motors.
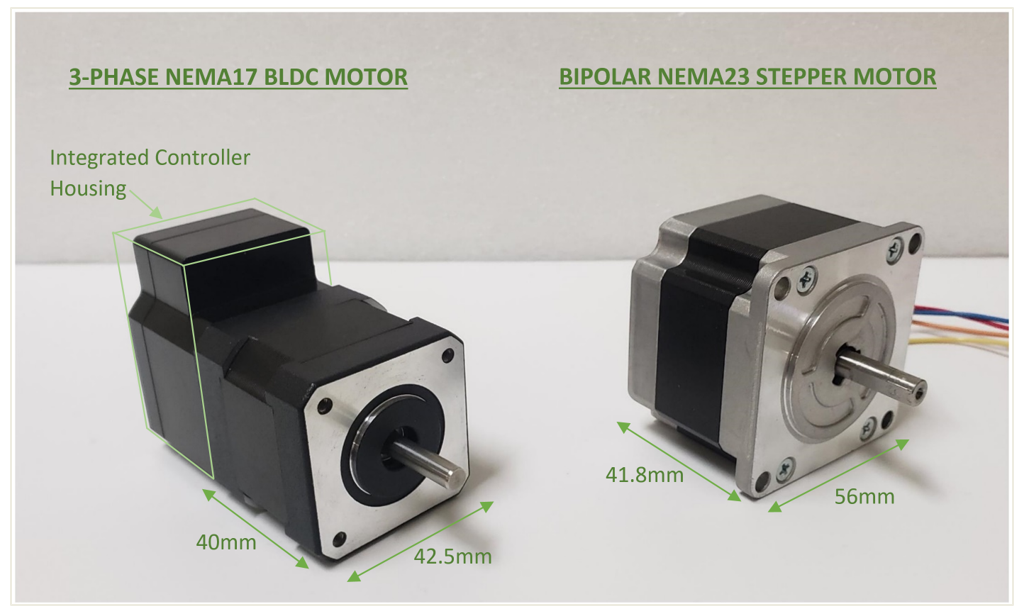
Figure 6: Key Dimensions of the MMS742038-24-R1-1 and General-Purpose Stepper Test Motor
Using these dimensions, the volume can be estimated as 73cm3 for the BLDC motor and 131cm3 for the stepper motor. A motor’s output power is equal to the output speed multiplied by the output torque. The BLDC motor continues to spin at a higher speed compared to the stepper motor under the same load conditions, which means that the BLDC motor provides a higher power density, since it has a higher power output with a smaller volume (see Figure 5b and 5c). Power density plays an important role in applications with limited available space and a high power requirement, such as drones and quadcopters.
Temperature Rise Comparison
As discussed previously, constant current operation for the stepper motor leads to major energy losses in the windings, mainly in the form of heat. During the experiment, the motors’ body temperature was measured in an ambient temperature of 22°C. Figure 7 shows the results of the motor body’s temperature rise over time.
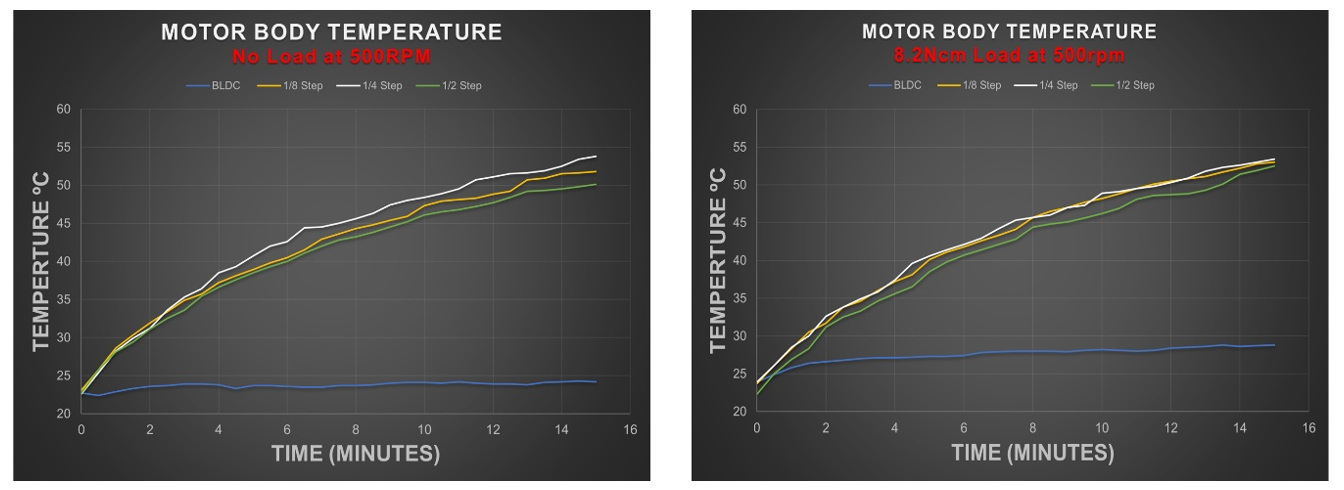
Figure 7: Motor Body Temperature Rise Over Time (TAMBIENT = 22°C)
The stepper motor’s temperature rises steadily regardless of the load on the shaft. In comparison, the brushless DC motor’s ability to not draw excessive current means the body temperature only increases minimally. Unlike stepper motors, BLDCs convert a high percentage of input power into mechanical power instead of heat. Appropriate thermal solutions should be considered for stepper motor applications.
Acceleration and Noise Comparison
The high pole count of steppers is directly responsible for their superior positional accuracy over BLDCs. However, the high pole count also results in limited acceleration and high audible noise during operation. Accelerating a stepper motor can be difficult since it requires a gradual ramping of motor speed to sustain the shaft’s angular positional accuracy. If a stepper accelerates quickly, then it faces the risk of missing steps, which can be catastrophic in many applications. In addition, if there is low input current combined with high acceleration demand, then the stepper may stall.
In terms of noise, brushless DC and stepper motors can detect a particular torque, otherwise known as cogging torque, which causes vibrations and ringing at every step of the stepper motor rotation. Because the BLDC current draw is proportional to the load on the shaft, BLDCs can draw the additional current required to accelerate the load within the motor’s rated speed range. BLDCs are much quieter during normal operation than steppers. Therefore, BLDC motors are reliable and efficient solutions that offer high speed, high acceleration, and less audible noise.
Conclusion
To discuss the advantages and disadvantages of stepper and brushless DC motors, this article reviewed experiments for DC current draw under different load conditions, as well as motor body temperature rise. During constant current operation, stepper motors waste excessive energy compared to BLDC motors, regardless of load. Steppers also do not produce high torque in the high-speed range and dissipate more heat into their surroundings. As a result, stepper motor applications require proper thermal design considerations.
While the positional accuracy of BLDC motors is proportional to the angle sensor accuracy, integrated BLDC motors with a high-resolution angle sensor can offer excellent positional accuracy. With microstepping, stepper motors offer superior positional accuracy over brushless DC motors. This comes with the disadvantage of offering less torque beginning from mid-range speeds, which lead to missing steps or stalling. Steppers lack the ability to quickly accelerate, and they produce more noise than BLDCs. Overall, stepper motors are a cheaper solution, but they are limited to low-speed applications. BLDC motors are dependable, quieter solutions that offer higher efficiency and accuracy across a wide speed range.
Validate your login
Log in to your account
Create New Account