Instantaneous Mode Switching with Servo Motors
Charan Bhamra
Introduction
This article discusses instantaneous switching between control modes in servo motor systems. In closed-loop servo control systems, there are three essential control modes: torque, speed, and position. Each of these parameters can be individually controlled depending on the application. A single control mode suffices for some applications, while other advanced applications may require multiple control modes within the same motion operation.
In most traditional servo control systems, a given motion must be completed before switching between different control modes. Otherwise, the drive signal may experience a spike or significant drop in winding current that can adversely affect the performance of the motion profile. This creates complications for designs that require using multiple control modes without interruption.
Instantaneous Mode Switching
EZmotion’s second generation of servo motors and controllers offers a wide selection of options that feature instantaneous mode switching (see Table 1).
Table 1: EZmotion Servo Motors and Controllers
| EZmotion Series | Part Number |
| MMS760xxx series | MMS760200-48-C2-1 |
| MMS760400-48-C2-1 | |
| MMS760200-48-R2-1 | |
| MMS760400-48-R2-1 | |
| MMP760xxx series | MMP760100-75-C2-1 |
| MMP760100-75-R2-1 | |
| MMP760100-75-E2-1 | |
| MMP760200-75-C2-1 | |
| MMP760200-75-R2-1 | |
| MMP760200-75-E2-1 | |
| MMP760400-75-C2-1 | |
| MMP760400-75-R2-1 | |
| MMP760400-75-E2-1 |
These motors and controllers provide instantaneous mode switching capability, enabling seamless switching between multiple control modes while the motor is in motion. Instantaneous mode switching can also be categorized as bumpless switching between servo control modes. While bumpless switching generally applies to mode switching between manual mode and automatic mode in proportional integral derivative (PID) control, it can be used similarly in servo motor control.
The feedback of all control signals is constantly monitored to develop the nested loop control structure of EZmotion servo motors and controllers. Typically, only one of the three control loops is connected to the output signal; however, unconnected control loops can also develop as if they are connected to the output signal. Therefore, when switching between control modes, the motor can smoothly transition between different control loops without any jumps in the output control signal.
Advantages of Instantaneous Mode Switching
Instantaneous mode switching provides advantages that are highly relevant in various applications, particularly in fields that involve industrial automation, control systems, and manufacturing. Maintaining continuous and smooth operation is vital for product quality and consistency. The advantages described below help avoid disruptions that can affect overall motion-related process efficiency.
• Allows for seamless transitions between all control modes
• Preserves tuning and loop parameters during control mode switching
• Provides outstanding stability and performance during switching operation
• Offers additional flexibility and functionality to deploy advanced control algorithms for applications
• Useful in haptic force feedback control schemes
Definitions and Comparison Metrics
The current in motor windings is typically responsible for torque generation and rotation. In three-phase field-oriented control (FOC), the three-phase motor system is simplified and transformed into a two-axis direct-quadrature-zero (DQZ) transformation reference system. The minimized D-axis current (ID) is parallel to the rotor pole axis, and is not responsible for torque generation. The maximized Q-axis current (IQ) is perpendicular to the rotor pole axis, and is responsible for torque generation in the motor.
FOC with triple cascade loop control is the foundation for seamless mode switching in motor control. In a triple cascade loop configuration, each loop is responsible for regulating different aspects of the system such as current, speed, and position. The output of one loop is used as the setpoint for another loop, creating a cascading effect.
Figure 1 shows the cascade control loop structure used in EZmotion servo motors.
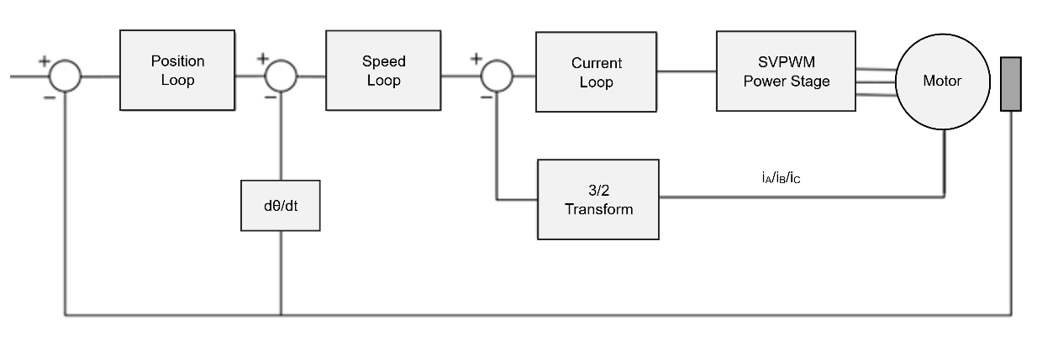
Figure 1: Cascade Control Loop in EZmotion Servo Motors
IQ feedback is a reliable indicator of the motor system’s performance and stability. Therefore, we will examine and compare IQ feedback during mode switching to evaluate the motor’s seamless mode switching performance.
Figure 2 shows the control output signals during mode switching. With instantaneous mode switching, the motor starts in speed control mode with a target speed of 3000rpm and an acceleration of 10000rpm/s. At 5s, the motor seamlessly switches to position control mode with the speed at 1000rpm. After a few seconds of operating in position mode, the motor transitions to torque control mode with the target torque set to 20% of the motor’s nominal torque. Finally, the motor switches back to speed control mode with a target speed of 3000rpm.
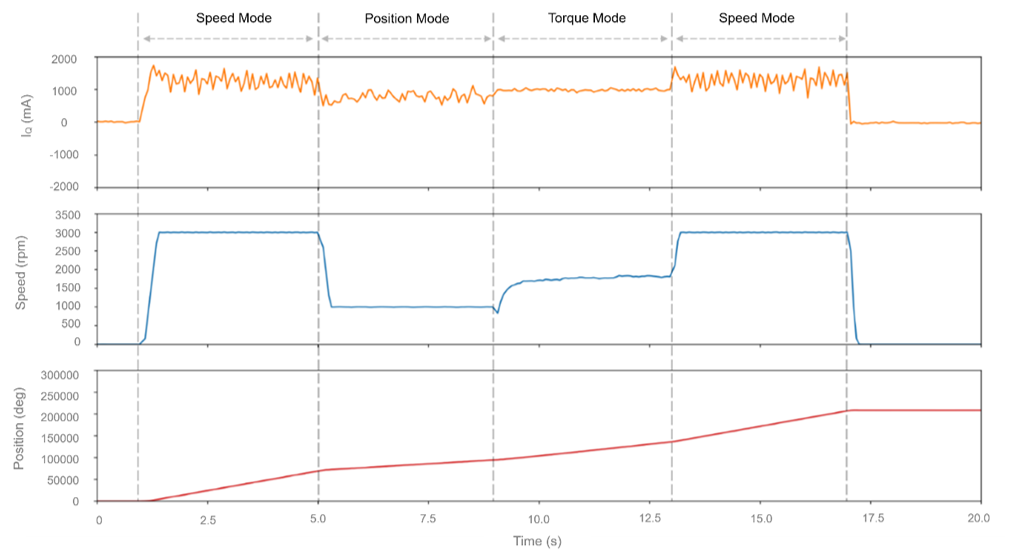
Figure 2: Control Output Signals during Mode Switching
As Figure 2 shows, there are no bumps and spikes observed in the IQ signal during mode switching, and the respective control output signals are appropriately controlled to the reference signals after switching. Thanks to instantaneous mode switching, the motor is physically stable with no shaking or bouncing behaviors observed. In comparison, traditional motors that lack seamless mode switching capabilities shake or attempt to bounce off the ground during actual operation mode switching. IQ spiking may trigger a fault or protection, leading to an abrupt pause in motor operation.
Application Examples
Cobot with Feeding or Insertion Applications
Feeding and insertion applications require a cobot to accurately place parts and apply precise insertion force. In these types of applications, the servo can operate in position control mode to align the part, then switch to torque mode to apply the appropriate mechanical insertion force. Seamless mode switching allows the cobot to smoothly transition between position and torque mode while maintaining stability and performance. Consider a plastic clip insertion application, where the clip must be seated at a set location and depth before being pressed into the mating assembly with precise insertion force. Figure 3 shows an illustration of the insert placement and pressing process of an industrial cobot.
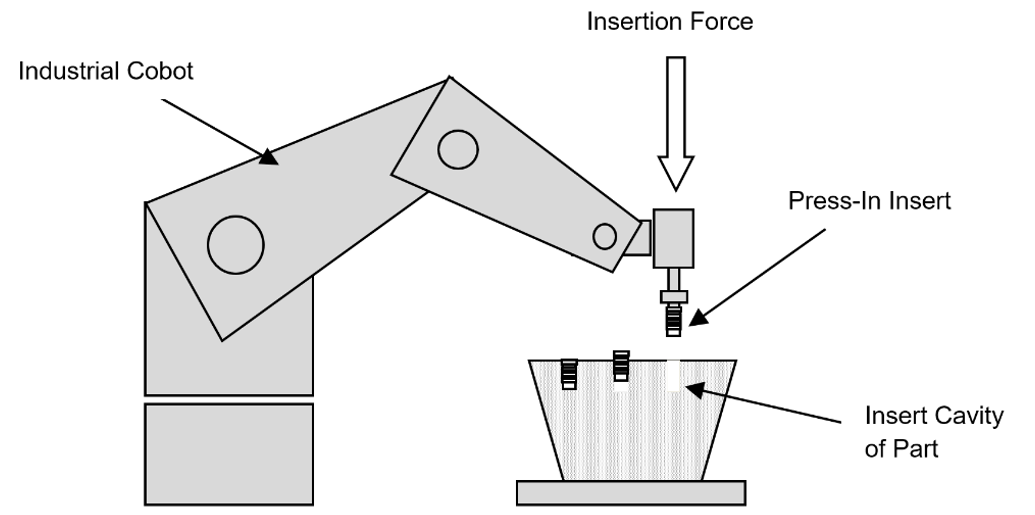
Figure 3: Insert Placement and Pressing Process of Industrial Cobot
Automated Centrifuge Systems
Centrifuge systems use centrifugal force to separate liquid, gas, and solid substances based on the density. Automated centrifuge applications interact with pick-and-place machines, requiring precise speed control during the centrifuge process and accurate position control to stop. During the centrifuge separation process, the rotor holding the samples spins at a set speed for a given time, then seamlessly transitions to position mode. This stops the rotor at the target position in a single motion operation. The accurate stopping position allows the pick-and-place robot to load or transfer samples to their designated locations. Figure 4 shows an illustration of an integrated pick-and-place robot in a centrifuge system.
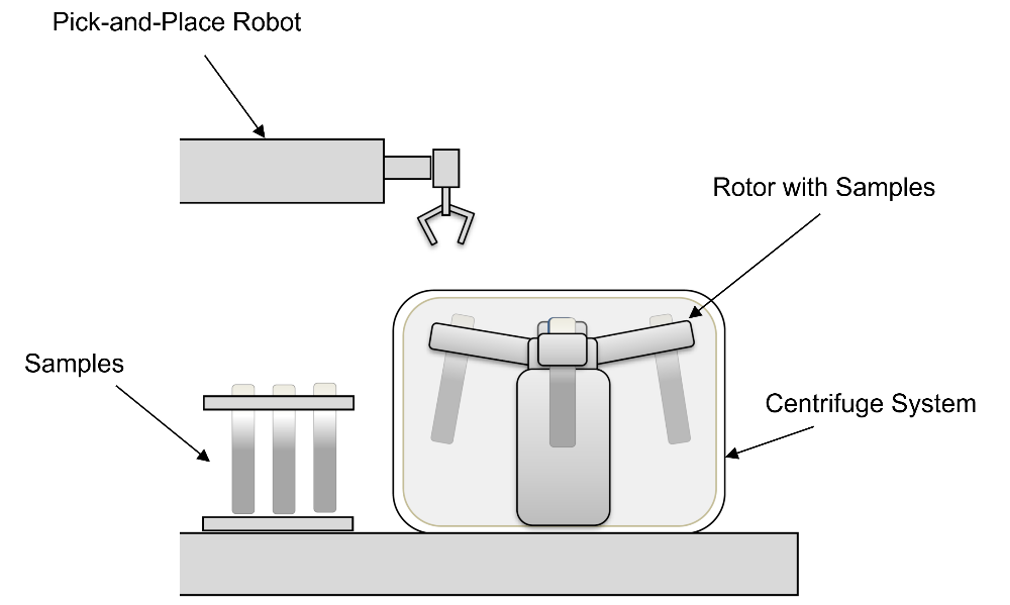
Figure 4: Integrated Pick-and-Place Robot in Centrifuge System
Spin Rinse Dryer (SRD) Systems for Wafers
Spin rinse dryers (SRDs) clean and dry semiconductor wafers in a series of cycles that includes rinsing, purging, and drying the wafers. A cassette holding a rack of wafers is loaded into the rotor inside the SRD chamber. This load-balanced rotor is responsible for the spinning motion in the wafer cleaning process. The rinse, purge, and dry cycles are driven in speed control mode for a set duration at given speeds. After all cycles are completed, the rotor holding the wafers requires position control mode to stop in an upright position without interruption. Instantaneous mode switching can enable seamless transition between speed and position control modes to achieve the SRD process in a single motion operation.
Figure 5 shows an illustration of the SRD system for wafer cleaning.
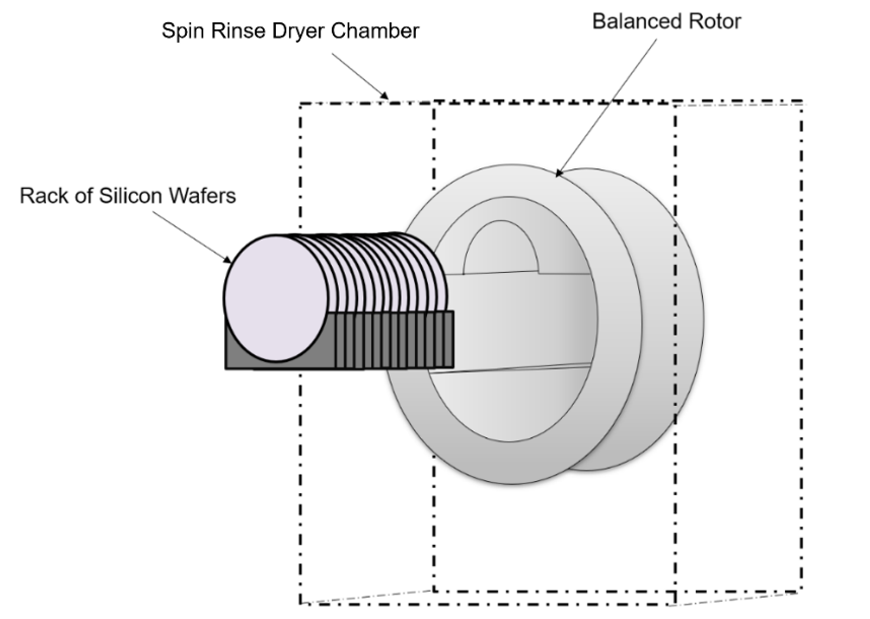
Figure 5: SRD System for Wafer Cleaning
Conclusion
This article demonstrated how instantaneous mode switching with the MMS760xxx series and MMS740xxx series from EZmotion provides immediate and seamless transitions between different control modes in servo motor systems without any noticeable delays. In the control loops, the feedback of all control signals is constantly monitored to enable flexible motor systems that can meet strict mode switching requirements on the fly. Smooth, uninterrupted servo motor operation improves overall efficiency in industrial automation applications, including feeding and insertion applications, automated centrifuge systems, and SRD systems for wafers.
Learn more about EZmotion’s robust portfolio of all-in-one servo motors and drive modules to optimize precision as well as overall motion operation using instantaneous mode switching.
Validate your login
Log in to your account
Create New Account